GearInPos (フライングソー)
を参照してください BasicMotion_GearInPos.project インストールディレクトリ内の例 CODESYS 下 ..\CODESYS SoftMotion\Examples。
この例では、 MC_GearInPos フライングソーを実装します。このプロジェクトでは、インストールすることをお勧めします CODESYS Depictor、アプリケーションを 3D アニメーションとして表示できます。(ライセンスのない無料バージョンでもこれを行うには十分です。)
アプリケーションの構造
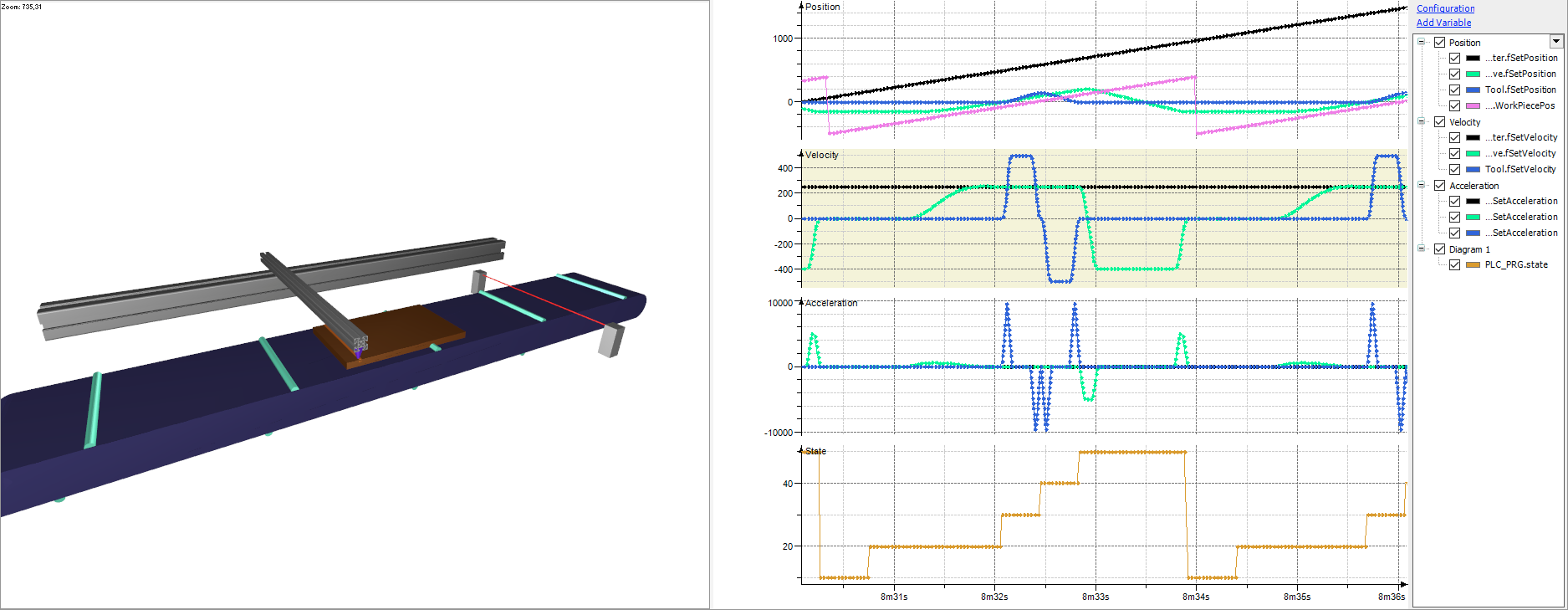
アプリケーションは、 PLC_PRG プログラム、3D表現(シーン、 DepictorCalculation プログラム)、簡単なワークピースシミュレーション(SimulateWorkpiece プログラムの実行結果(実行結果のグラフ、実行結果の要約、実行結果の要約)と、関数ブロックの効果を簡単に理解できるトレースを提供します。
PLC_PRG のフローは次のとおりです。
軸を有効にするには
MC_Power。 (STATE_POWER)光バリアがワークピースを検出するまで待ちます。
STATE_WAIT_FOR_WORKPIECE)光バリアがワークピースを検出するとすぐに、鋸をコンベアベルトと平行に搬送するスレーブがコンベアベルト上のワークピースと同期します(
Master軸)。STATE_WAIT_FOR_SYNC)同期が達成されると、鋸はワークピースに対して垂直に前後に1回移動します。
STATE_MOVE_TOOL_0/1)スレーブを休止位置に移動し、プロセスを 2 から再度開始します。(
STATE_MOVE_TO_REST)
座標系と次元
座標系の原点はコンベア ベルトの中心にあり、Z 軸は上向き、X 軸はコンベア ベルトの移動方向を指します。コンベア ベルトから見ると、Y 軸はのこぎりから離れる方向を指します。
コンベアベルトとワークピースの寸法、光バリアの位置、およびワークピースと同期して鋸が動作する位置は、定数として保存されます。 GVL Const。
使用法
アプリケーションを起動します。 シーン Depictor オブジェクトとトレースでは、マスター (コンベア ベルト上のワークピース) とスレーブ (のこぎり) 間の同期がどのように実行されるかを確認できます。